在一项具有突破性的最新研究中,科研团队开发出一种新型电子皮肤,使类人机器人能够区分日常触碰与具有潜在破坏性的外力,这一原本只属于生物神经系统的能力,正有望重塑机器人与物理世界,尤其是与人类互动的方式。
该项研究近期发表在《美国国家科学院院刊》(PNAS)上,由慕尼黑工业大学及合作机构研究者共同完成,核心目标是为机器人构建一套更可靠的“疼痛”感知机制,用以识别有害接触,并据此触发保护性反应,而不仅仅停留在简单的压力检测层面。
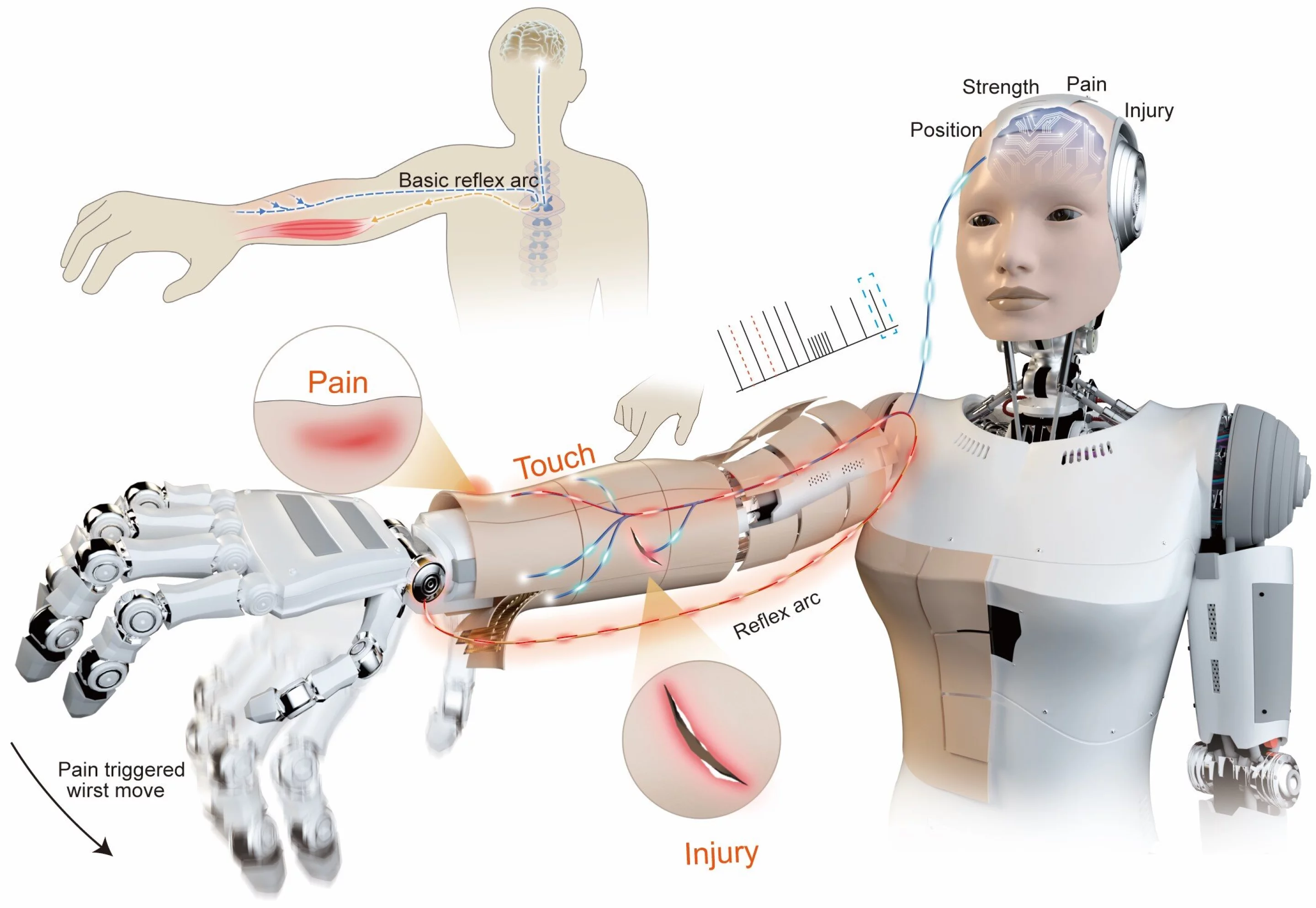
这套电子皮肤系统的基础,是分布在表面内部的一整套柔性压力传感器网络。当皮肤被触碰、压迫或撞击时,传感器会将机械力转化为电信号;在正常情况下,这些信号会被送入机器人的中央处理单元。但在这一新系统中,一旦感知超过预设阈值,电子皮肤将不再按常规路径上传,而是直接向电机发出信号,驱动执行机构立刻做出回避或减力等“反射式”动作。
与传统方案相比,这一系统的独特之处在于其信号编码方式。研究团队采用了仿生神经元的“类神经形态(neuromorphic)编码”,不再把触觉视为单一的压力数值,而是把作用力转译成快速的电脉冲序列。脉冲的频率与模式,会根据接触的强度和位置发生变化:当外力处于安全范围内时,信号模式对应“普通接触”,一旦压力越过阈值,模式就会发生明显突变,从而触发保护性响应。
研究人员强调,系统检测的是机械应力而非情绪或高级感受,这种“痛觉样”机制是一种功能性信号——它帮助机器人识别并应对有害外力,但并不意味着机器具有情感或主观体验。
论文作者在报告中写道,这一类神经形态机器人电子皮肤采用分级、类神经结构架构,实现了高分辨率触觉感知、主动疼痛与损伤检测以及局部反射,并具备模块化快速更换、维修能力,从而显著提升机器人的触觉能力、安全性及更为直观的人机交互体验,为“具同理心”的服务机器人奠定基础。
为验证系统性能,研究团队对电子皮肤进行了多种形式的物理测试,从轻触到逐步增强的外力,以模拟潜在的伤害性接触,观察系统能否实时准确地区分安全与危险状态。在多轮实验中,传感器网络能够稳定地产生可区分的信号模式,并根据外力大小启动不同程度的保护反应。系统响应时间在毫秒级,足以支撑诸如迅速缩回受力部位、降低抓握力度等实时动作,同时在多次重复接触循环下仍能保持信号输出稳定,显示出较好的耐用性。
这些性能改善,对于人机近距离协作的安全性具有直接意义。随着机器人从封闭工厂逐渐走向家庭、医院、公共空间等人类日常环境,任务场景中的近距离互动大幅增加,意外碰撞乃至过大用力的风险也随之上升。传统安全措施多依赖外部传感器、预设运动边界或紧急停机程序,这些机制虽然有效,却往往较为迟缓或刚性。而将触觉与“痛觉样”感知直接嵌入机器人“皮肤”,则使机器人能在本地、即时对威胁做出反应。
在协作任务中,这项技术同样有望提高表现,例如共同搬运物体、助行设备或多种服务机器人应用。借助实时调整接触力,机器人可以在握持易碎物品、接触人体或适应不可预测环境时,更自然地控制力度,降低夹碎、滑落或误判触点的风险。
从更广的层面看,这种技术也在改变人类对机器的感知方式。一个会对外力做出明显“躲避”“减力”反应的机器人,即便并不具备任何情感体验,在视觉上也显得更“有反应”“更像生命体”。这种反馈很可能让人机互动变得更直观:正如人们在对方后退时会本能放轻触碰,当机器人的“退缩”行为可被察觉,人类也更容易调整自己的动作,从而减少无意伤害。
不过,这项技术也带来了关于“机器人逼真度”的更广泛讨论。当机器人在安全与性能上借鉴生物的感知策略,是否也会在伦理与设计层面引入新的问题?部分研究者认为,机器人未必需要“类似疼痛”的信号系统;另一些声音则指出,借鉴生物机制可能是实现高度适应性与鲁棒性的最高效路径。如何在功能收益与“拟人化过度”的社会后果之间找到平衡,成为新的挑战——尤其是在此类皮肤若被接入由人工智能管理的“情绪反应”模块时,这一问题将更加敏感。
目前,这一技术仍处于研究早期阶段,距离走向商业化还有不小距离。现有电子皮肤仅覆盖有限区域,要扩展至完整类人形体表,不仅需要在制造工艺上大幅提升,还必须解决功耗与数据处理方面的瓶颈。未来工作将重点放在扩大传感覆盖面积、提高耐久性等方向,这些关键步骤将决定这种新型机器人皮肤能否从实验室原型走向真实应用场景。
据介绍,这项研究的学术成果已发表于《美国国家科学院院刊》,相关新闻稿由TechXplore等科技媒体进行报道。